
导读:
在癌症联合疗法中,集成多种治疗功能的微型机器人系统已成为克服传统治疗局限的关键方向。近期,上海大学马立教授团队开发了一种基于微流控制备的磁性热敏水凝胶胶囊微型机器人(MTHCM),该机器人通过核壳结构实现亲/疏水药物共载,并利用外部磁场控制实现靶向运动与局部磁热疗,在模拟血管环境中展现出精准的运动控制能力和“热疗-化疗”协同治疗潜力。相关研究以“Microfluidics-based fabrication and targeted motion control of multimodal therapeutic hydrogel capsule microrobots”为题目,发表在期刊《Journal of Materials Chemistry B》上。
本文要点:
1、本研究提出了一种基于微流控技术制备的磁性热敏水凝胶胶囊微型机器人(MTHCM),用于肿瘤血管内靶向给药与磁热疗协同治疗。
2、通过丙烯酰胺和海藻酸钠改性聚N-异丙基丙烯酰胺水凝胶,将其相变温度调节至42°C并提升溶胀性能。
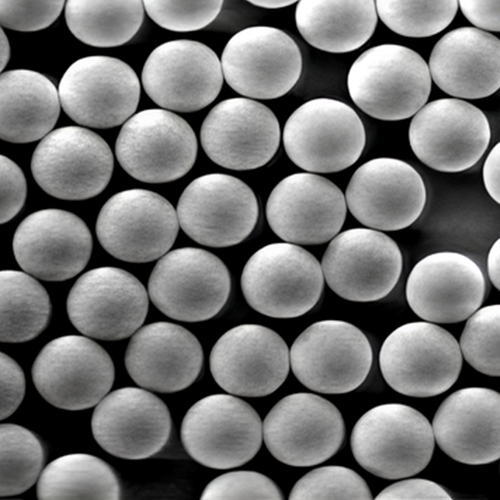
3、利用多同轴微流控芯片,可控制备单核与核壳结构微球,实现亲疏水药物共载与Fe₃O₄纳米粒子的定向封装。
4、在180 kHz交变磁场中,微型机器人周围的局部温度在4分钟内从21°C升至42°C,成功触发水凝胶的相变收缩并释放药物,同时达到热疗的温度阈值。
5、此外,本研究建立了视觉反馈磁驱动系统,在7.4 mT磁场强度下,微型机器人的最大运动速度达3.47 mm/s,实现了毫米级定位精度和血管微通道中复杂的曲线轨迹跟踪。
6、该集成化平台具备磁导航、热触发释药与磁热治疗功能,为低毒性、高效的肿瘤协同治疗提供了新策略。
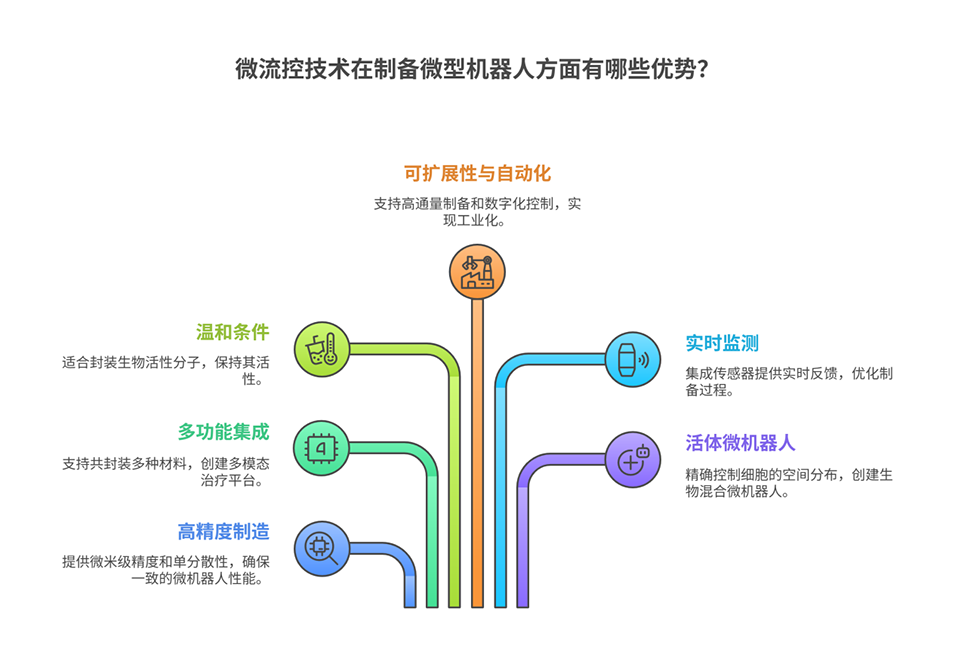
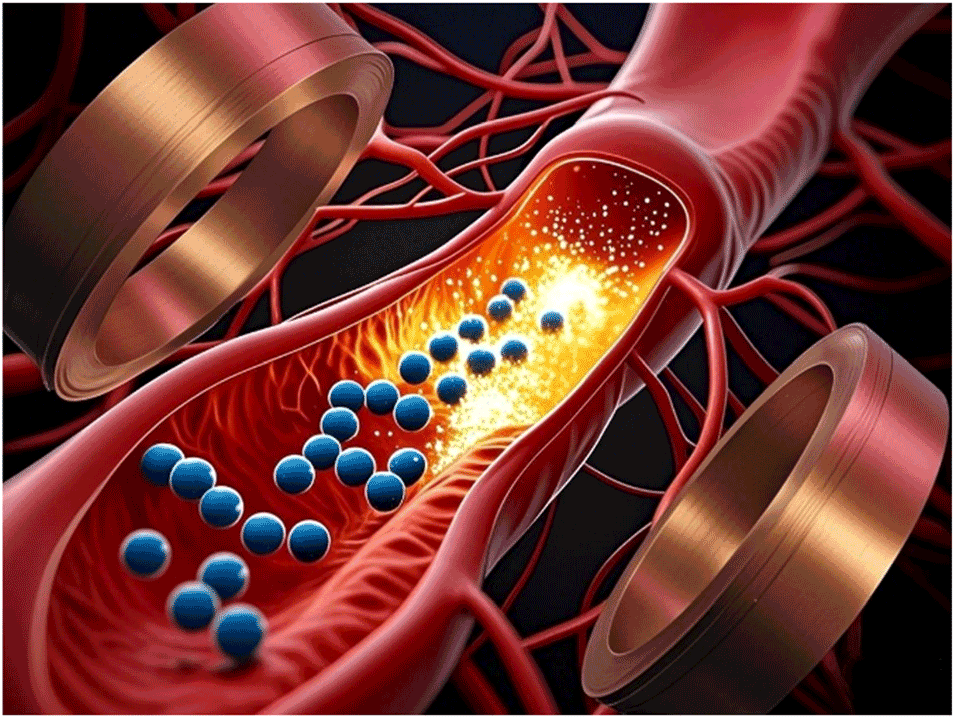
图1. 磁性热敏水凝胶微机器人在血管内执行多模态治疗的示意图
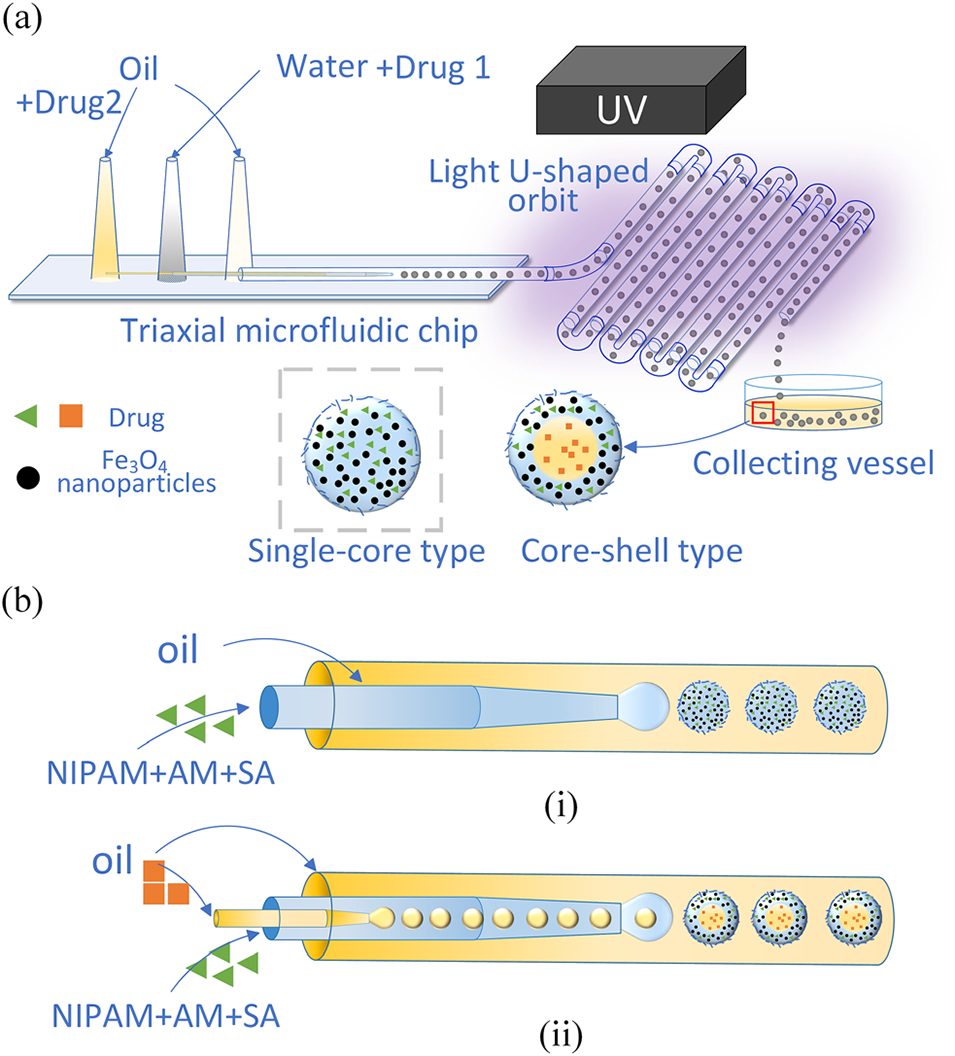
图2.(a)磁性热敏水凝胶胶囊微机器人的制备流程示意图;(b)双同轴微流控芯片的微通道结构(i)、三同轴微流控芯片的微通道结构(ii)
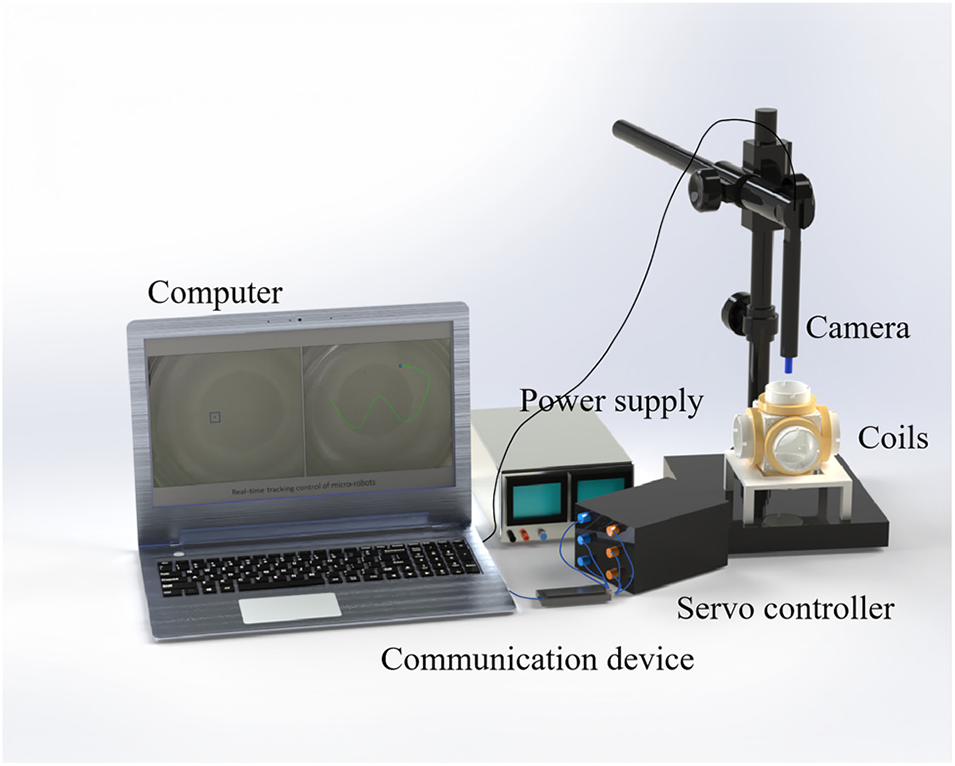
图3. 带视觉反馈的磁驱动系统
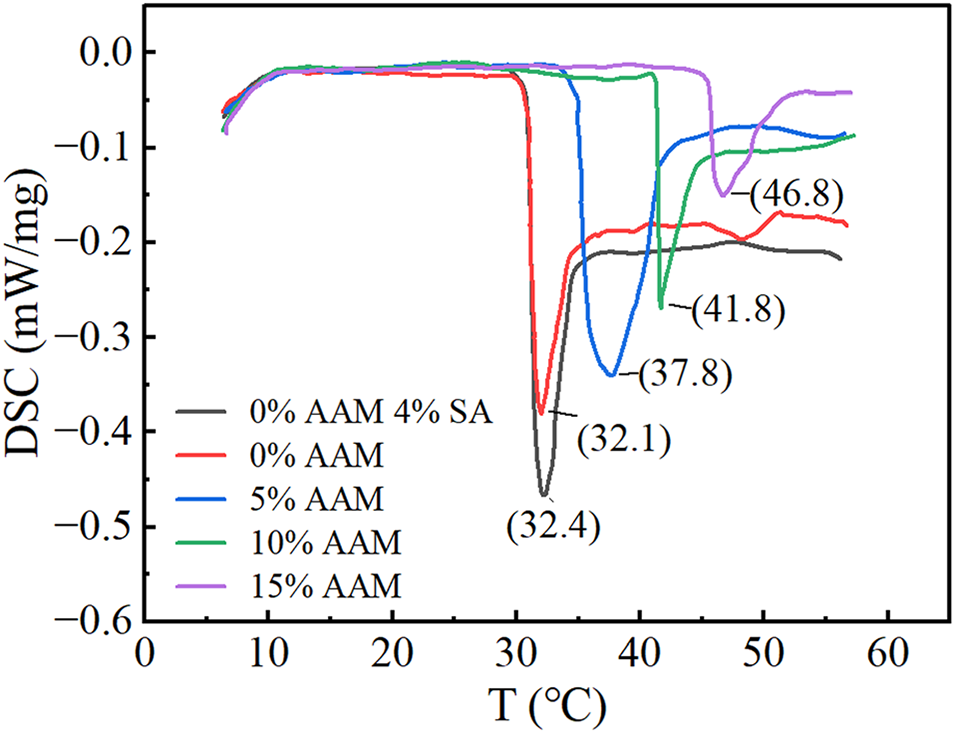
图4. 不同丙烯酰胺含量对水凝胶相变温度的影响
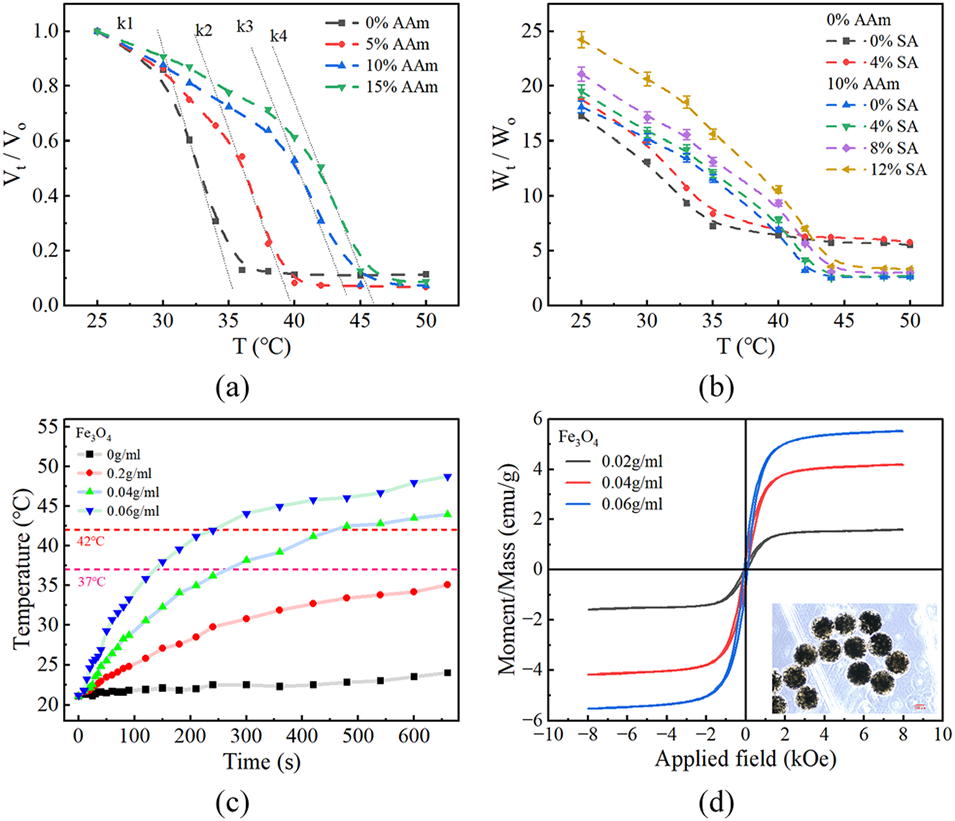
图5.(a)不同丙烯酰胺含量的微球在不同温度下的溶胀性能(体积比);(b)不同丙烯酰胺和海藻酸钠含量的微球在不同温度下的溶胀性能(质量比);(c)四氧化三铁纳米颗粒浓度对升温性能的影响;(d)不同四氧化三铁纳米颗粒浓度下微机器人的磁化曲线
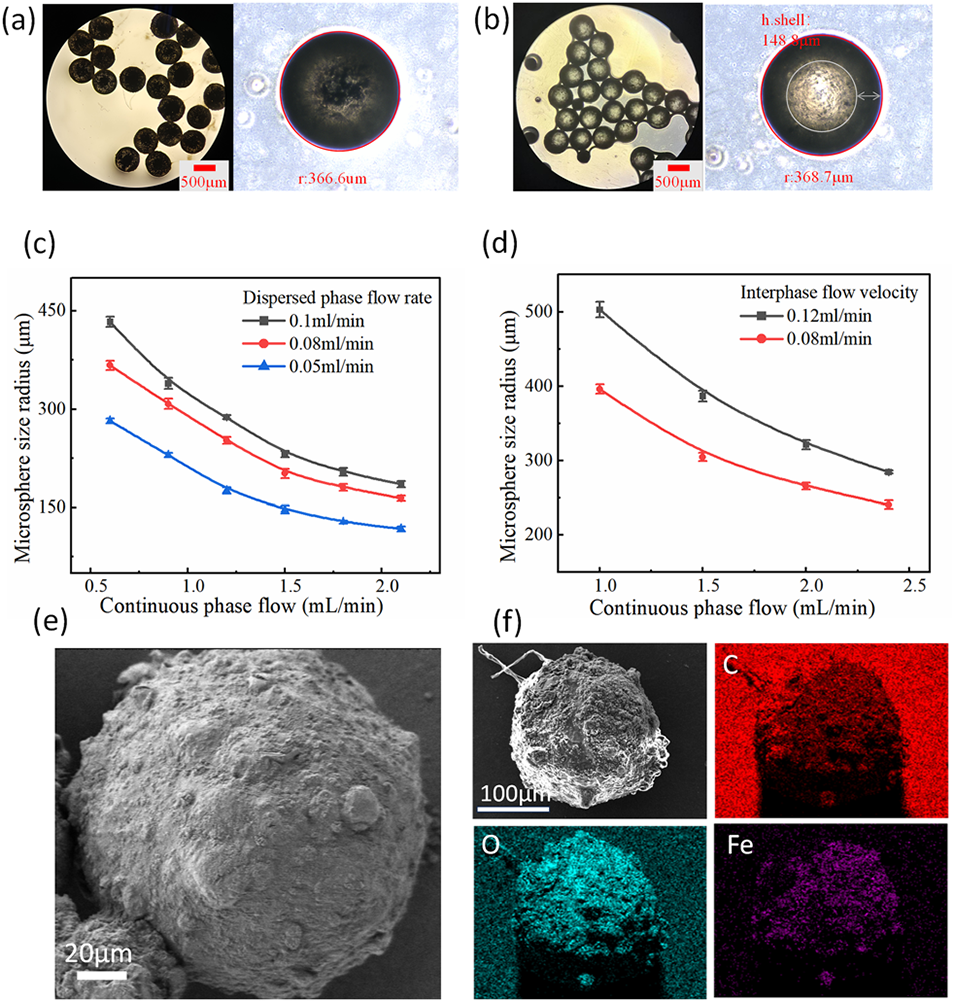
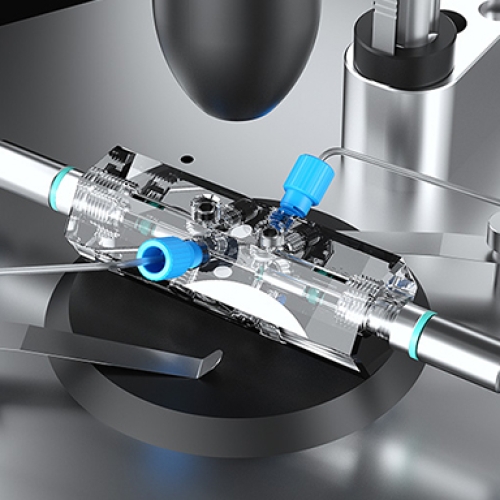
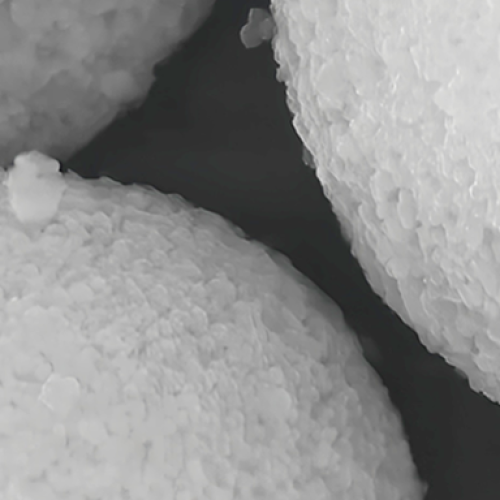
图6. 单核结构(a)与核壳结构(b)微球机器人的光学显微镜图像;(c)各相流量与单核微球尺寸半径的关系;(d)各相流量与核壳结构微球尺寸半径的关系;(e)磁性热敏水凝胶胶囊微机器人的SEM图像;(f)元素映射结果
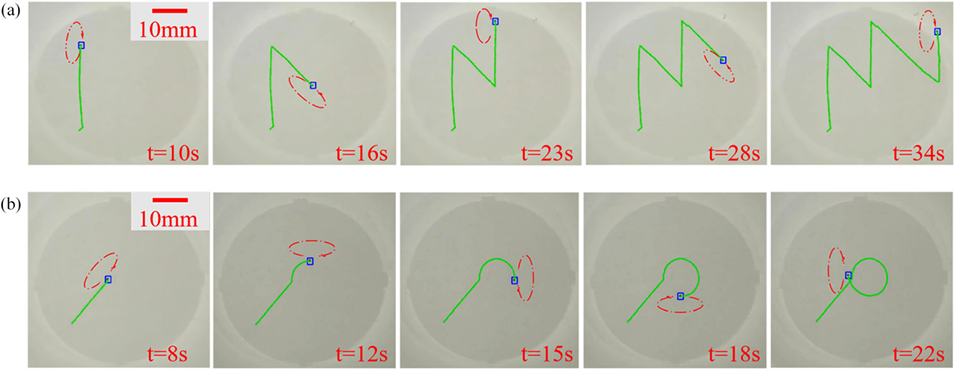
图7. 微机器人沿N型轨迹(a)和O型轨迹(b)运动的过程
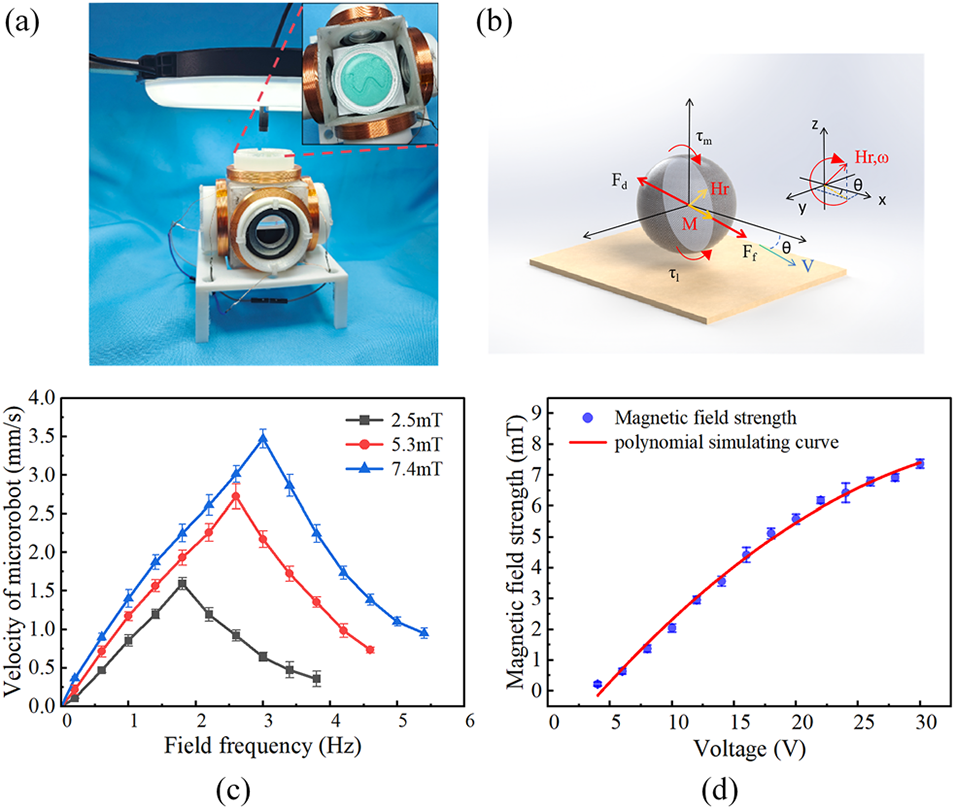
图8.(a)磁驱动平台与运动轨迹空间布局;(b)微机器人受力示意图;(c)步速与磁场频率的关系;(d)电压与磁场强度的关系
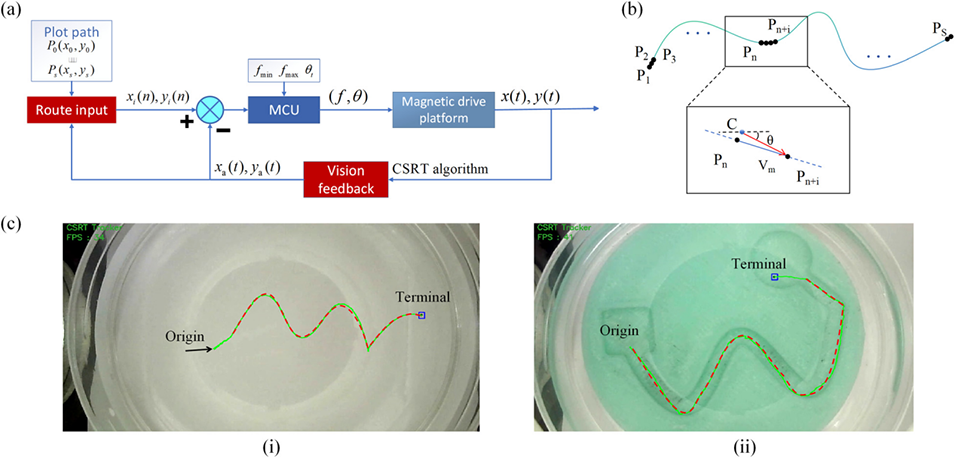
图9.(a)微机器人轨迹跟踪控制器;(b)路径分段机制;(c)平面空间内的路径跟踪(i)、轨道空间内的路径跟踪(ii)
论文链接:https://doi.org/10.1039/D5TB00767D
(本文仅供参考学习及传递微流控研究成果,版权归原作者所有,如侵犯权益,请联系删除)