
导读:
纺织工程与柔性电子的交叉融合,推动了功能纤维在医疗诊断、软体机器人等领域的应用。然而,在单一纤维系统中同时集成多种功能仍是一项巨大挑战。近日,浙江大学施建峰教授、陈东研究员等人在国际知名期刊《Small》上发表题为“Microfluidic Wet-Spun Core–Shell Elastomer Fibers with Integrated Sensing and Actuation Capabilities”的研究论文。文章报道了一种基于微流控湿纺技术制备的核壳结构弹性体纤维,其以液态金属为导电传感内核、液晶弹性体为驱动外壳,实现了应变传感与电热驱动的一体化集成。该纤维展现出高灵敏度、可逆驱动及良好的机械性能,并通过构建闭环反馈系统,验证了其在自适应调控方面的应用潜力。
本文要点:
1、该研究聚焦纺织工程与柔性电子融合背景下多功能纤维的研发难题,通过同轴微流控湿纺技术设计并制备了核-壳结构的液态金属-液晶弹性体(LM-LCE)纤维,实现了传感与驱动功能的集成。
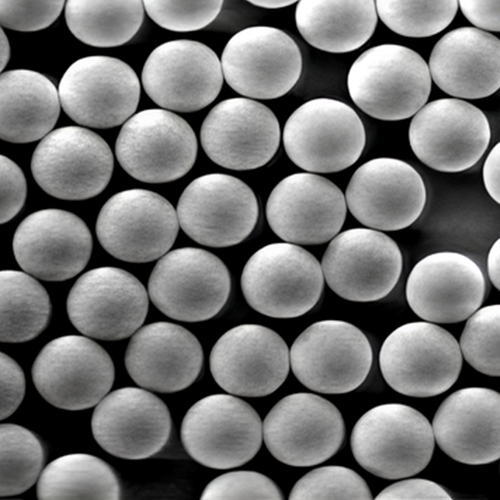
2、纤维核心由液态金属(Ga-In合金)纳米液滴与热塑性聚氨酯(TPU)组成,通过互连导电通路实现稳定的应变依赖型电阻传感,150%应变下电阻变化达80%,且对弯曲、按压、扭转等多种形变均有响应,可用于手指弯曲角度等运动传感;外壳为液晶弹性体(LCE),通过液晶介晶的向列相-各向同性相转变实现电热驱动,1.2V电压下驱动应变达30%,能完成重物升降等动作。
3、制备过程中通过两步交联与后拉伸工艺优化纤维结构与性能,所得纤维兼具良好的可重现性、可重复性、可调性与可控性。
4、基于其集成功能,该研究开发了闭环控制系统,可通过实时电阻传感、焦耳加热、驱动调节实现不同载荷下目标纤维长度的自动维持。
5、该核-壳结构设计为下一代多功能纤维提供了通用平台,有望应用于自主软体机器人、自适应假肢、触觉人机界面等多个领域。
在同轴微流控湿纺制备LM-LCE核壳纤维的工艺体系中,凝固浴的组分与配比是调控纤维成型质量的关键参数。本研究通过系统考察乙醇-水(E/W)不同混合比例(90/10、85/15、80/20、75/25及70/30)对纤维形貌的影响,确定75/25为最优体积比;同时在该凝固浴体系中引入0.5wt.% Irgacure 184光引发剂,借助乙醇与内核溶剂四氢呋喃(THF)、外壳溶剂二甲基亚砜(DMSO)的良好互溶性,促进纺丝原液中溶剂快速扩散与相分离,最终实现纤维的均匀固化与结构完整性。
纤维制备过程中的两步交联策略,是保障其结构稳定性与功能协同性的核心设计:其一,溶剂交换完成后启动第一步交联,依托硫醇-丙烯酸酯迈克尔加成反应,使交联剂PETMP分子中的硫醇基团与液晶介晶RM257的碳碳双键发生共价结合,构建起部分交联的LCE外壳网络,为纤维提供初步的结构支撑;其二,在后拉伸工艺与紫外(UV)固化协同作用下开展第二步交联,未参与第一步反应的RM257残余双键在光引发剂作用下完全反应,形成致密交联结构,不仅固定了液晶介晶沿纤维轴向的取向排列,更显著优化了纤维的机械强度与电热驱动循环稳定性,为其传感-驱动一体化功能的实现奠定结构基础。
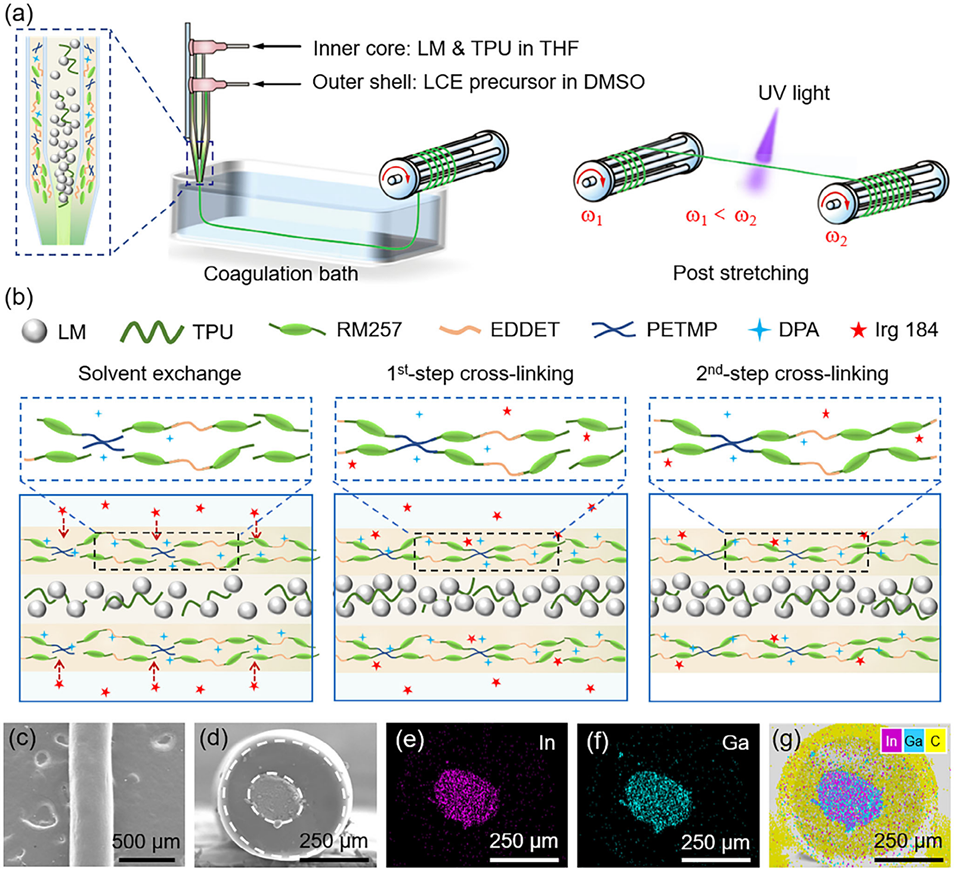
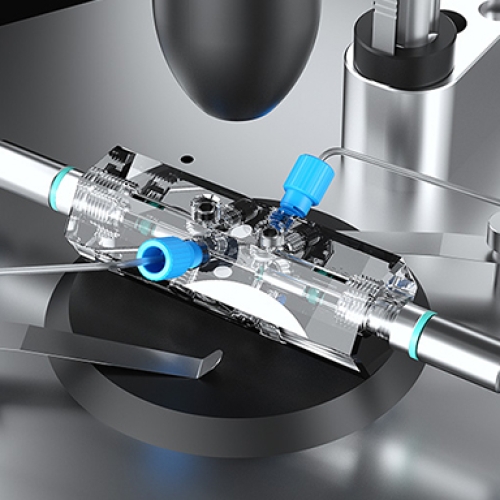
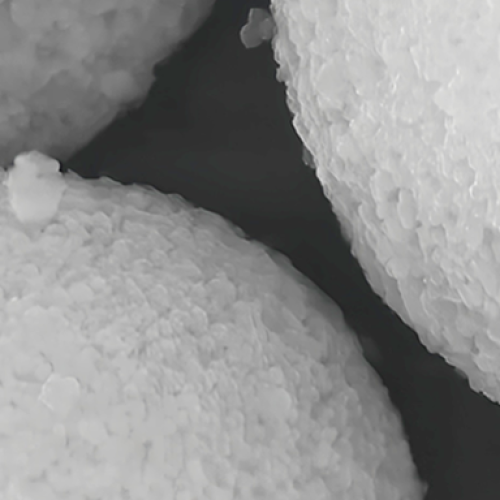
图1展示了通过微流控湿纺技术制备核壳结构LM-LCE纤维的过程示意图与纤维形貌。a) 为湿纺过程示意图;b) 为纤维制备过程中的两步交联机制;c-g) 分别为纤维的SEM图像、截面图以及EDS元素分布图(In、Ga及其叠加),证实了具有清晰核壳结构的纤维成功制备。
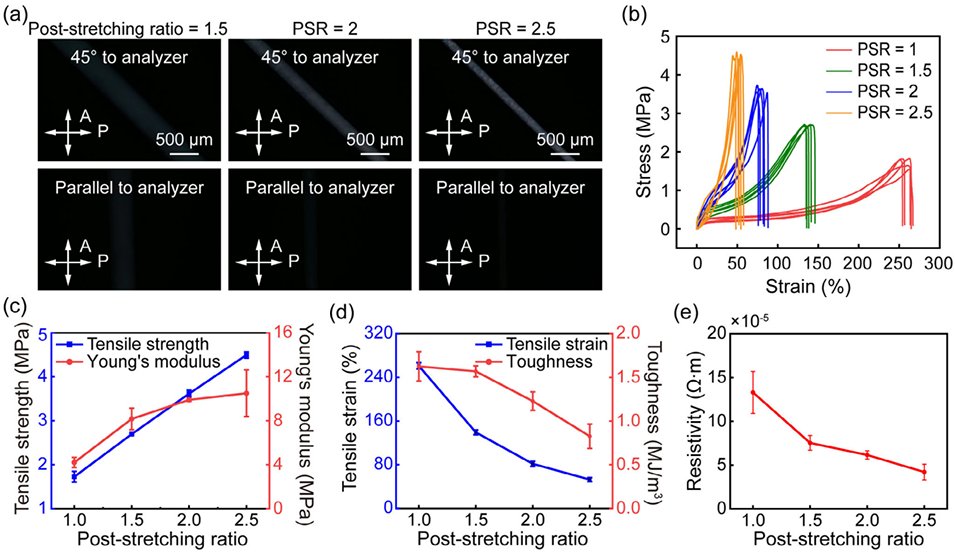
图2 表征了LM-LCE纤维的光学、力学与电学性能随后拉伸比例(PSR)的变化。a) POM图像显示随着PSR增大,双折射增强,表明液晶介晶沿纤维轴取向更好;b-d) 应力-应变曲线及衍生的拉伸强度、杨氏模量、断裂应变和韧性表明力学性能可通过后拉伸调节;e) 电阻率随PSR增大而下降,归因于液态金属纳米液滴形成更多互连通路。
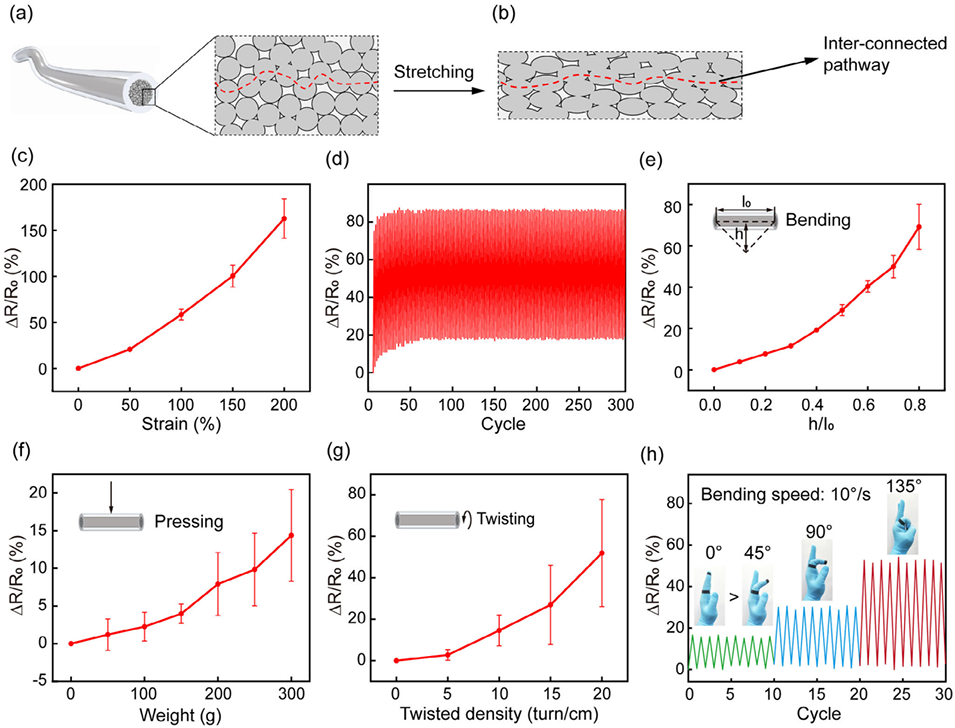
图3 展示了LM-LCE纤维的传感性能。a-b) 示意图说明了拉伸前后导电通路的互连变化;c) 电阻变化率与拉伸应变的关系;d) 在150%应变循环拉伸下,电阻变化表现出良好的可重复性;e-g) 纤维在弯曲、按压和扭曲变形下电阻变化率与变形强度的关系;h) 基于电阻变化率实时感测手指弯曲角度的演示。
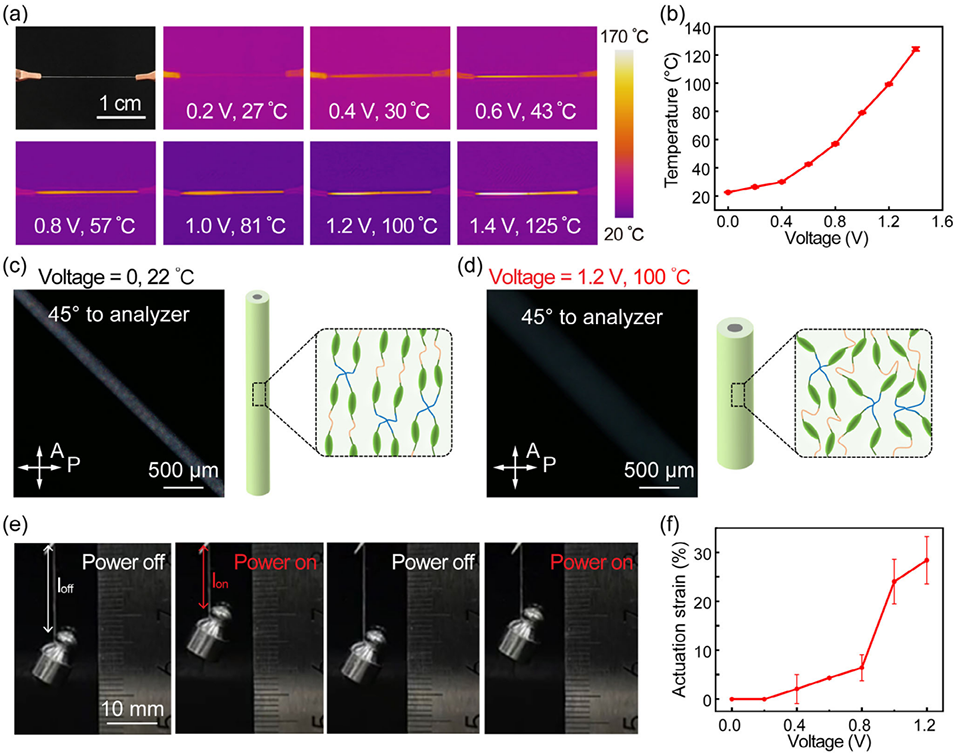
图4 展示了LM-LCE纤维的驱动性能。a) 不同电压下通过焦耳效应加热纤维的红外热成像图;b) 纤维温度与施加电压的定量关系;c-d) POM图像显示在加热前后(0 V与1.2 V),纤维双折射从有到无,表明液晶介晶从向列相转变为各向同性相;e) 纤维在1.2 V电压下收缩,提起2g重物的驱动演示;f) 驱动应变与施加电压的关系,在1.2 V时达到最大30%的应变。
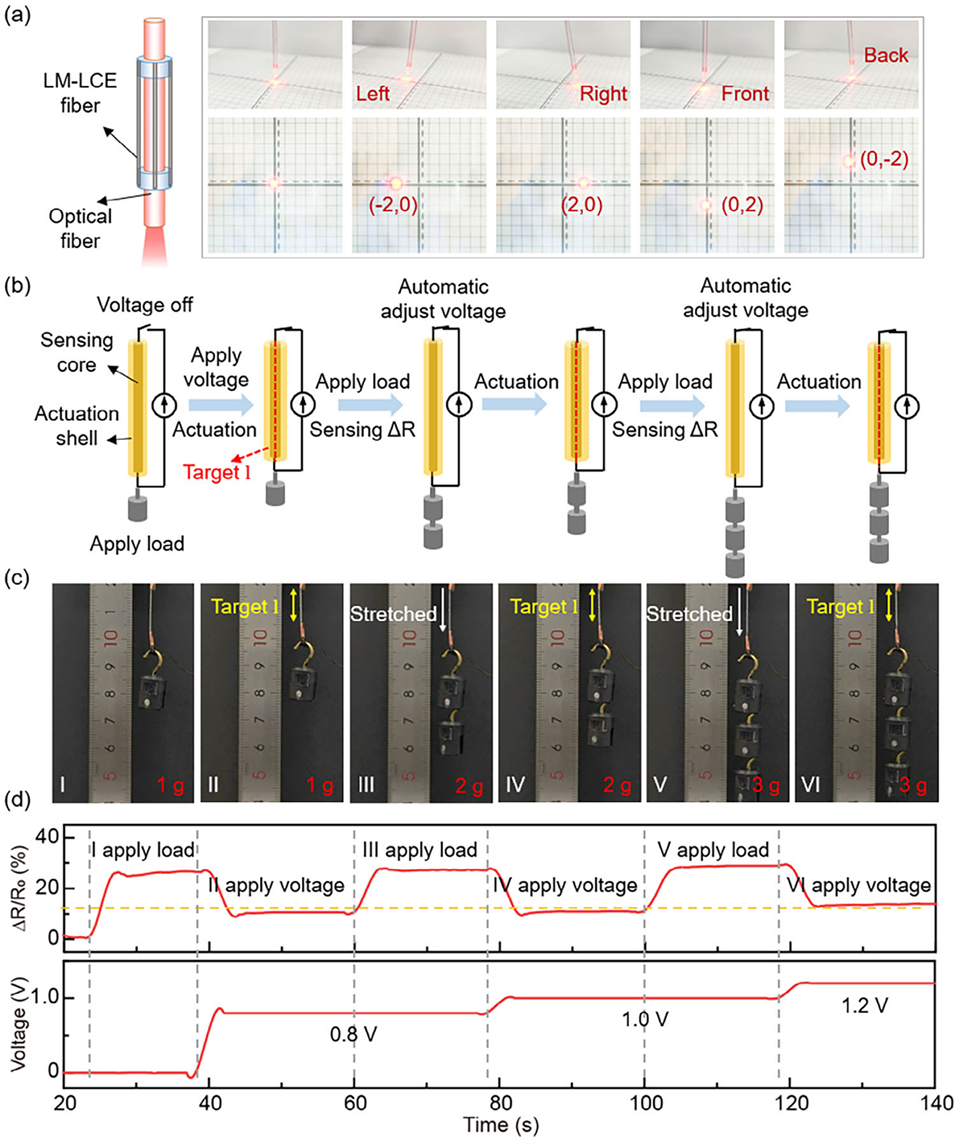
图5 展示了LM-LCE纤维的应用。a) 利用四根LM-LCE纤维的收缩驱动,实现光学微纤维在二维平面内的转向控制;b) 基于纤维传感与驱动功能的闭环控制系统示意图;c-d) 闭环控制系统的执行演示:当外加载荷改变引起纤维拉伸和电阻变化时,系统通过实时感测电阻变化并自动调节施加电压,使纤维长度恢复到目标值。
论文链接:https://doi.org/10.1002/smll.202509817
(本文仅供参考学习及传递微流控研究成果,版权归原作者所有,如侵犯权益,请联系删除)